英偉達近日推出了一款名為Alpamayo-R1的開源AI模型,旨在通過引入先進的“推理”技術,加速自動駕駛汽車的開發進程。這款模型以秘魯一座以攀登難度著稱的山峰命名,現已在GitHub和Hugging Face等開源平臺上線,供全球開發者使用。
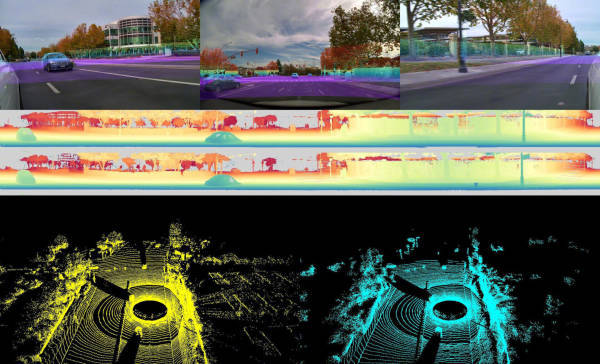
Alpamayo-R1是一款“視覺-語言-動作”三模態融合的AI模型,能夠實時解析自動駕駛汽車傳感器采集的道路信息,并將其轉化為自然語言描述的駕駛行為。例如,當車輛檢測到自行車道時,模型不僅會識別這一場景,還會主動解釋調整路線的決策邏輯。這一突破解決了傳統自動駕駛系統難以解釋路徑選擇依據的痛點,為工程師優化系統安全性提供了關鍵依據。
該模型的技術基礎源于英偉達今年1月發布的Cosmos-Reason推理框架,該框架具備決策前的邏輯推演能力。經過8月的版本擴展后,Alpamayo-R1進一步強化了多模態交互與實時推理性能。英偉達汽車營銷經理凱蒂·瓦沙巴赫(Katie Washabaugh)指出,開放平臺的核心目標之一是推動行業建立統一的模型評估標準,通過透明化技術邏輯加速自動駕駛技術的迭代。
作為全球AI芯片領域的領軍企業,英偉達近年來持續拓展軟件生態布局。其廣泛的軟件研究部門通過開源代碼共享策略,不僅鞏固了硬件市場的優勢,更構建起覆蓋芯片、算法、應用的全棧技術體系。此次開源的Alpamayo-R1模型,正是其“硬件+軟件”協同戰略的最新實踐。